Readers of this blog will know that one of the subjects that I have worked on over the last 40+ years has been the effect of cross winds on trains. By this time, one would have thought that I should have plumbed the depths of the topic, but it still has the ability to surprise. In this short (and very nerdy) post I want to describe a mathematical curiosity associated with this subject that I have recently become aware of.
Box 1, CWC Calculation methodology
In the book “Train Aerodynamics – fundamentals and applications” I set out a simple methodology for calculating Cross Wind Characteristics (CWCa) – essentially plots of overturing wind speed against train speed. This is based on a simple three mass model and the equations are set out in Box 1 above – equation (A) for the low yaw angle range, and equation (B) for the high yaw angle range. I won’t describe this in further detail here – the book only costs £132 on Amazon, so any interested readers can find a fuller description there and provide some minimal royalties to myself and the other authors.
Recently I have had occasion, as part of a consultancy project, to develop simple spreadsheet to enable CWCs to be calculated for a range of different types of rail vehicle. The method I chose was to solve equation (A) for low yaw angles below the critical yaw angle and equation (B) for high yaw angles above the critical angle, using the Newton Raphson iterative method. These equations give an explicit solution for the overturning wind speed at a train speed of zero. The value of train speed is then increased in small increments up to the vehicle maximum operating speed, with the first estimate in the iteration at any one wind speed being the converged value of wind speed from the previous calculation with a slightly lower train speed. Convergence is usually very rapid, usually just one or two iterations.

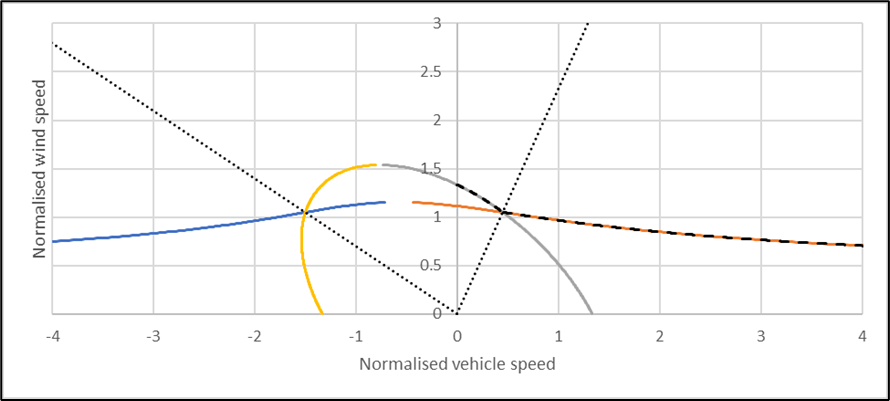
Figure 1 Calculated CWCs for n1=1.5, n2=0 for wind directions up to 90 degrees

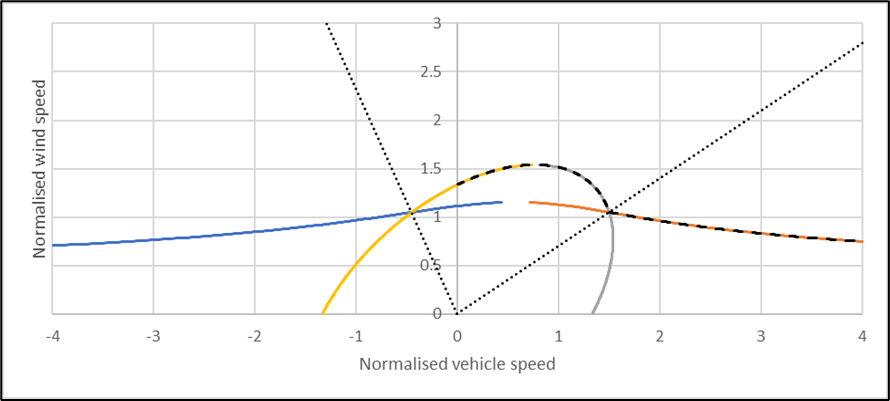
Figure 2 Calculated CWCs for for n1=1.5, n2=0 for wind directions above 90 degrees

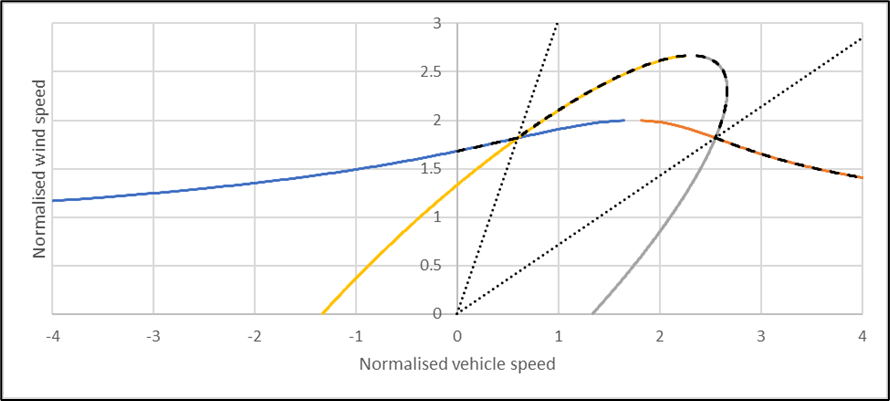
Figure 3 Calculated CWCs for for n1=1.5, n2=-0.5 for wind directions above 120 degrees
The methodology in general worked well, and some of the results for different wind directions relative to the train direction of travel are shown in Figures 1 and 2 (for lee rail rolling moment coefficients at 30 and 90 degrees of 2.2 and 3.5 respectively and parameters n1 and n2 of 1.5 and 0.0, i.e. a steadily increasing rolling moment coefficient up to the critical yaw angle, and a constant value above that angle). The two yaw angle ranges can be clearly seen, with the lower yaw angle range at the higher train speeds, and the higher yaw angle range at the lower train speeds. For the train aerodynamic characteristics shown here, the calculations are very stable up to a wind direction of 120 degrees. However, if the calculation is carried out for higher wind directions, then something odd happens and the iteration becomes unstable as can be seen for the 135 and 150 degree cases in figure 2. This effect is even more severe for different rolling moment characteristics. Figure 3 shows the CWCs for the same rolling moment coefficients and value of n1, but with a value of n2=-0.5 and thus with a peak at the critical yaw angle, which is typical of high-speed trains. Here we can see major instabilities for wind directions above 120 degrees. I was very puzzled as to why this was the case. Whilst in practical terms this is of no significance, as the overturning wind speeds for such wind directions are high and not close to the minimum critical value at any one vehicle speed, but nonetheless it would still be good to understand what was going on.
After playing around with the equations for a while, I found the best way to understand this was to regard equations (A) and (B) as quadratic equations in train speed and solve for train speed for a range of values of overturning wind speed. This is the wrong way round of course, as the vehicle speed is really the independent variable that can be specified, and the wind speed is the dependent variable that needs to be calculated but solving the equations in this way proved to be illustrative.
As the equations are quadratics, there are two solutions for train speed for each value of wind speed for each equation, and regions of the vehicle speed / wind speed plane where no solutions exist. There are thus four distinct solutions to the equations, two for the low yaw angle range and two for the high yaw angle range. These are shown for a range of different wind directions in Figure 4 for the same case as in figures 1 and 2. Here the solutions are shown for both positive and negative train speeds. The critical yaw angle condition is indicated by the short-dotted lines – between the lines the high yaw angle curves will form the CWC and outside them the CWC will be formed from the low yaw angle curves. The calculated CWCs (in the positive velocity quadrant) are shown by the long-dotted line.

a) Wind direction = 30 degrees
b) Wind direction = 60 degrees

c) Wind direction = 90 degrees
d) Wind direction = 120 degrees
e) Wind direction = 150 degrees
Figure 4 Complete solutions of equations A and B for for n1=1.5, n2=0
Consider first the 90 degrees yaw angle case (Figure 4c). Here the solutions are symmetric about the wind speed axis, and the CWC simply takes the positive high yaw angle solution at low vehicle speeds, and the low yaw angle solution at higher vehicle speeds. As the wind direction moves away from this case, the solutions become skewed, although there is still a degree of symmetry about the 90 degreecase, with the 30 degrees case being the image of the 150 degrees case, and the 60 degrees case being the mirror image of the 120 degrees case.
For the 30 degree case the CWC is formed entirely from a solution to a low yaw angle equation. At 60 and 90 degrees the CWC is formed from one low yaw angle solution, and one high yaw angle solution. At 120 degrees, the CWC consists of one low yaw angle solution and two high yaw angle solutions, whilst at 150 degrees the CWC consists of two low yaw angle and two high yaw angle solutions. There is thus considerable complexity here that is not fully revealed by simply considering the direct calculation of the CWC.
But coming back to the reason for this study, a consideration of the 150 degrees case shows the reason for the instabilities in figures 2 and 3. One of the high yaw angle curves that comprise the CWC doubles back on itself – ie there are two values of normalized wind speed that have the same values of train speed. The iterative method is thus jumping from one value to another and not converging,
As I said, this is not a practical issue as the overturning wind speeds in the wind direction range above 120 degrees are significantly higher than the minimum values which tend to occur around a wind direction of 80 degrees. The iterative calculation method for wind speed at a particular vehicle speed should only be used with caution in this range, and if values are required, the rather more cumbersome solutions for vehicle speed at a particular value of wind speed should be used. In personal terms the graphs of the solutions of figure 4 are rather attractive and their symmetry and form satisfying, and it was fun trying to sort out the reason for the instabilities. Being retired one has the leisure for this sort of thing! Perhaps however it is no bad thing to appreciate a little more the complexities behind what is intended to be a simple calculation method for CWCs.

One thought on “Cross Wind Characteristics – a mathematical curiosity”